Abstract
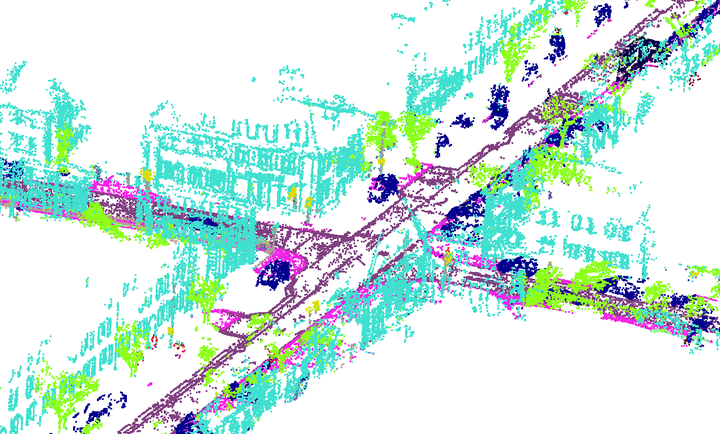
In this paper, we present a complete pipeline for 3D semantic mapping solely based on a stereo camera system. The pipeline comprises a direct sparse visual odometry front-end as well as a back-end for global optimization including GNSS integration, and semantic 3D point cloud labeling. We propose a simple but effective temporal voting scheme which improves the quality and consistency of the 3D point labels. Qualitative and quantitative evaluations of our pipeline are performed on the KITTI-360 dataset. The results show the effectiveness of our proposed voting scheme and the capability of our pipeline for efficient large-scale 3D semantic mapping. The large-scale mapping capabilities of our pipeline is furthermore demonstrated by presenting a very large-scale semantic map covering 8000 km of roads generated from data collected by a fleet of vehicles.