Über mich
- 3D Computer Vision
- Autonomes Fahren
- Mobile Robotik
- Digitale Signalverarbeitung
News
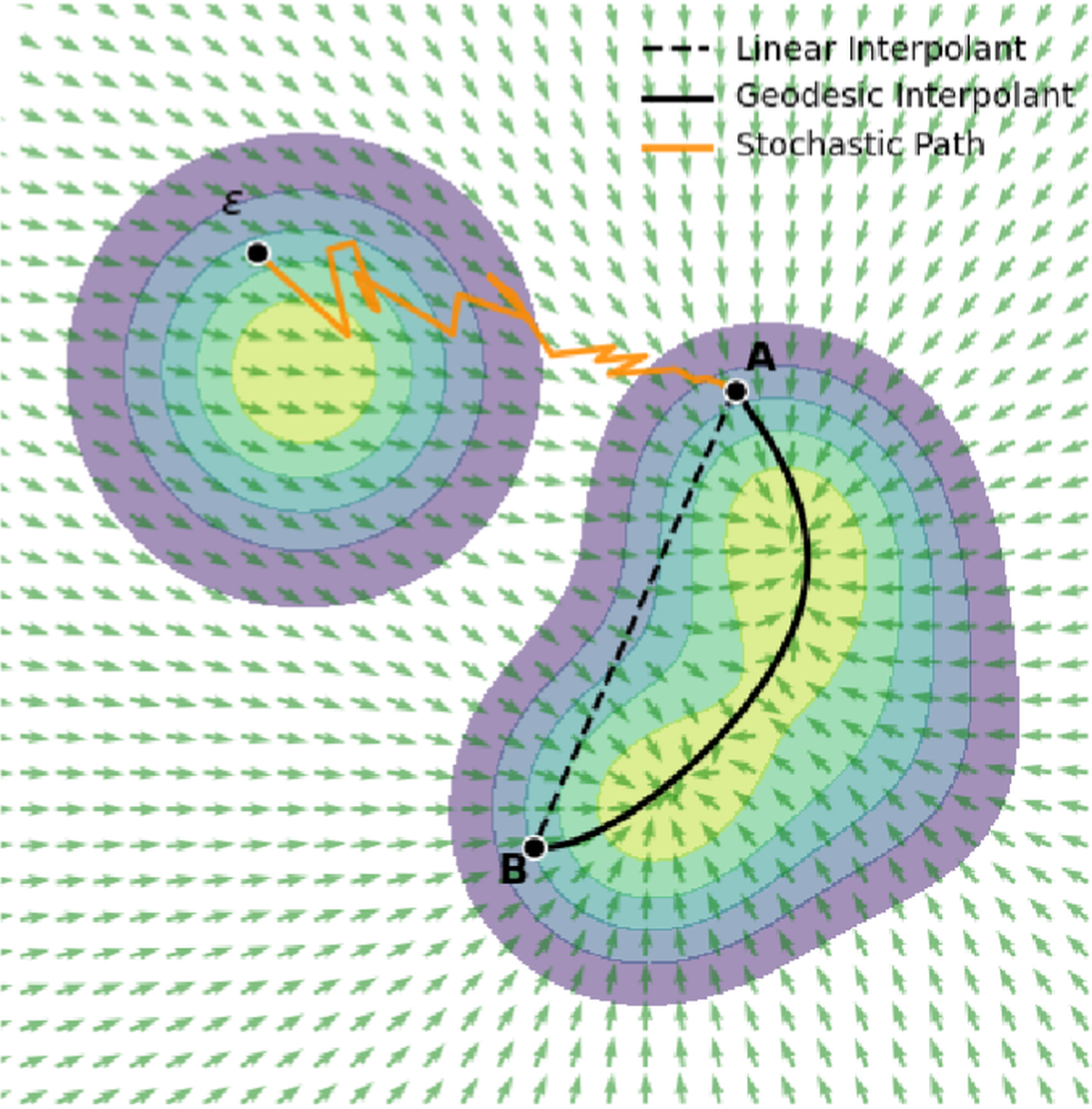
[03/2026] Xuqin Wangs’s work GeodesicNVS on geodesic flow matching for novel view synthesis has been accepted at CVPR 2026 in Denver.
[10/2025] We are organizing a workshop on Multi-modal Localization and Mapping (MuLMa) at ICCV in Honolulu. The workshop will take place on October 19, 2025.
[09/2025] Iqbal Banwait’s paper “CNN-Swin Backbones in Radar Object Detection for Autonomous Vehicles using Raw ADC Signals” has received the best short paper award at the 21st International Conference on Intelligent Environments.
[08/2024] Aymeric Fleith’s work LiFCal on light field camera online calibration has been accepted at GCPR 2024.
[03/2024] We are organizing the workshop ViLMa - Visual Localization and Mapping at CVPR in Seattle. The workshop will take place on June 17, 2024.
NEWS ARCHIVForschung
Map-based Localization
Localization within a pre-build map based on camera images
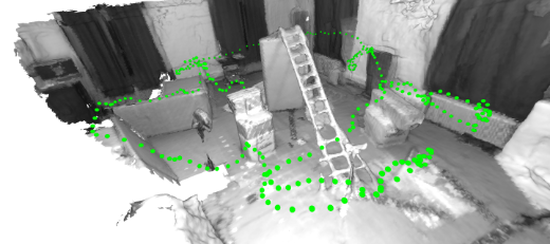
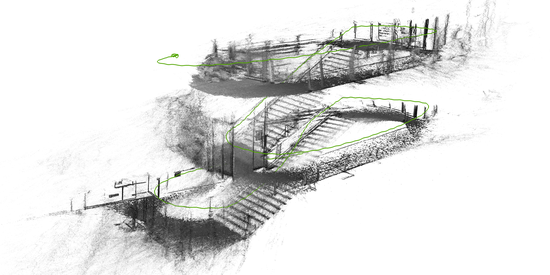
Dense Monocular SLAM
Tracking and dense 3D mapping based on a monocular camera

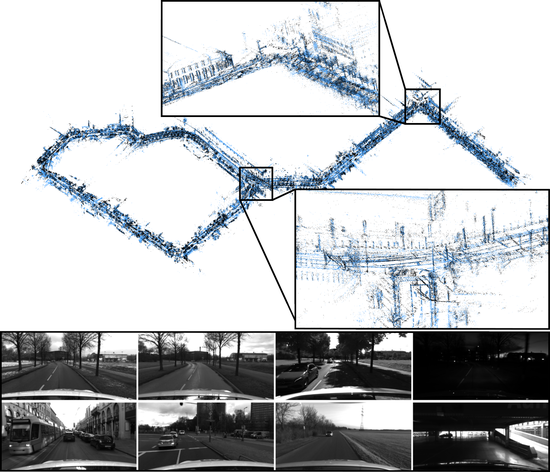
Large-scale Reconstruction
Camera based large-scale dense 3D reconstruction
Light Field SLAM
Localization and 3D mapping using micro lens array based light field cameras









Werdegang
Kontakt
- niclas.zeller@h-ka.de
- Moltkestr. 30
76133 Karlsruhe - Gebäude M, Raum 205