Light Field SLAM
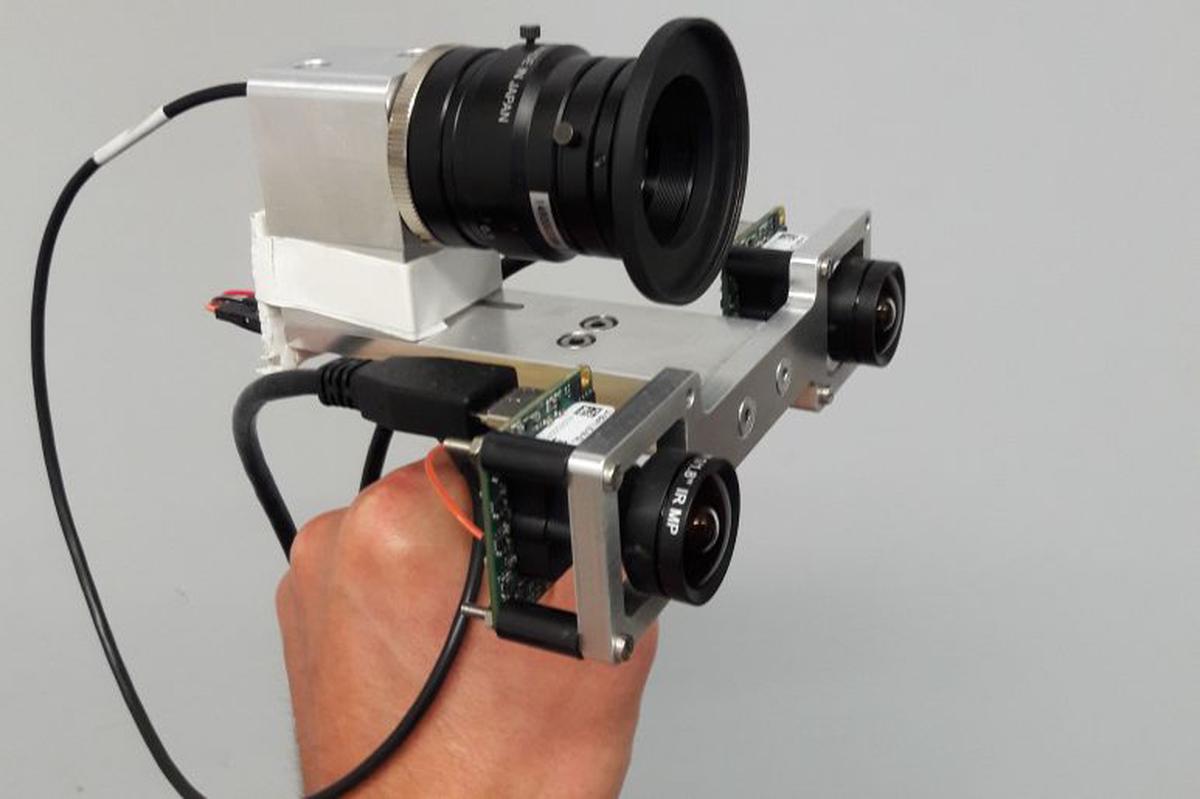
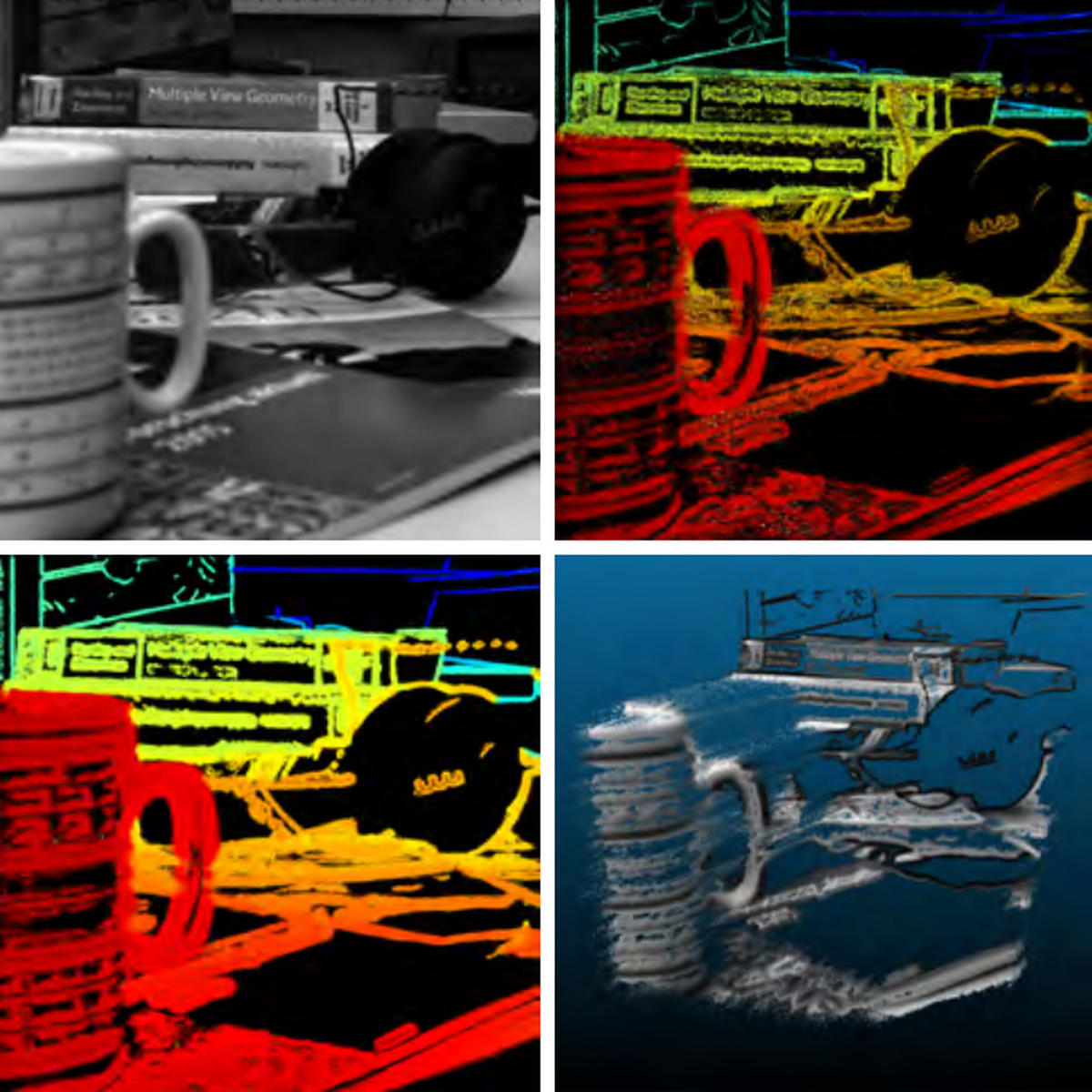
In contrast to standard cameras, light field (or plenoptic) cameras capture the light field of a scene in four dimensions (i.e. spatial and directional information).
Therefore, among others, one is able to obtain 3D information from a single recording of a light field camera.
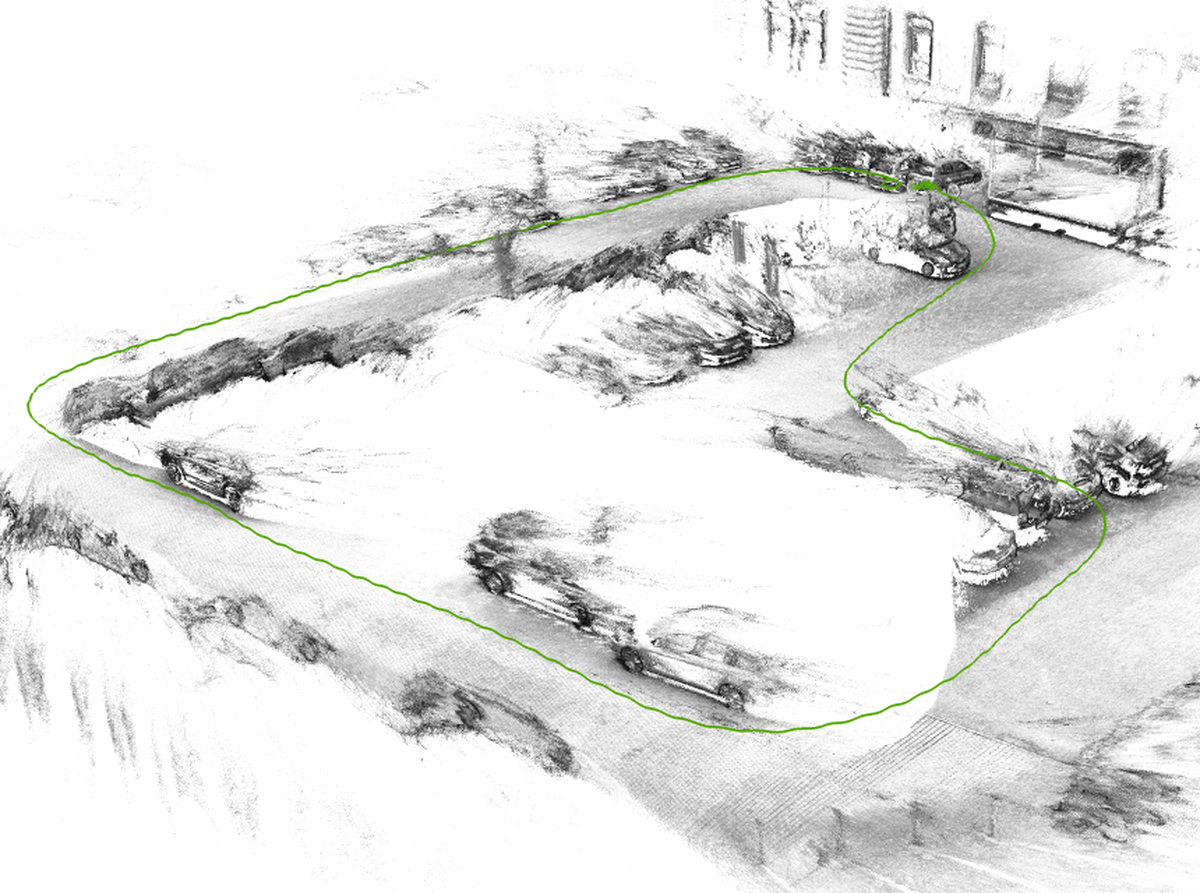
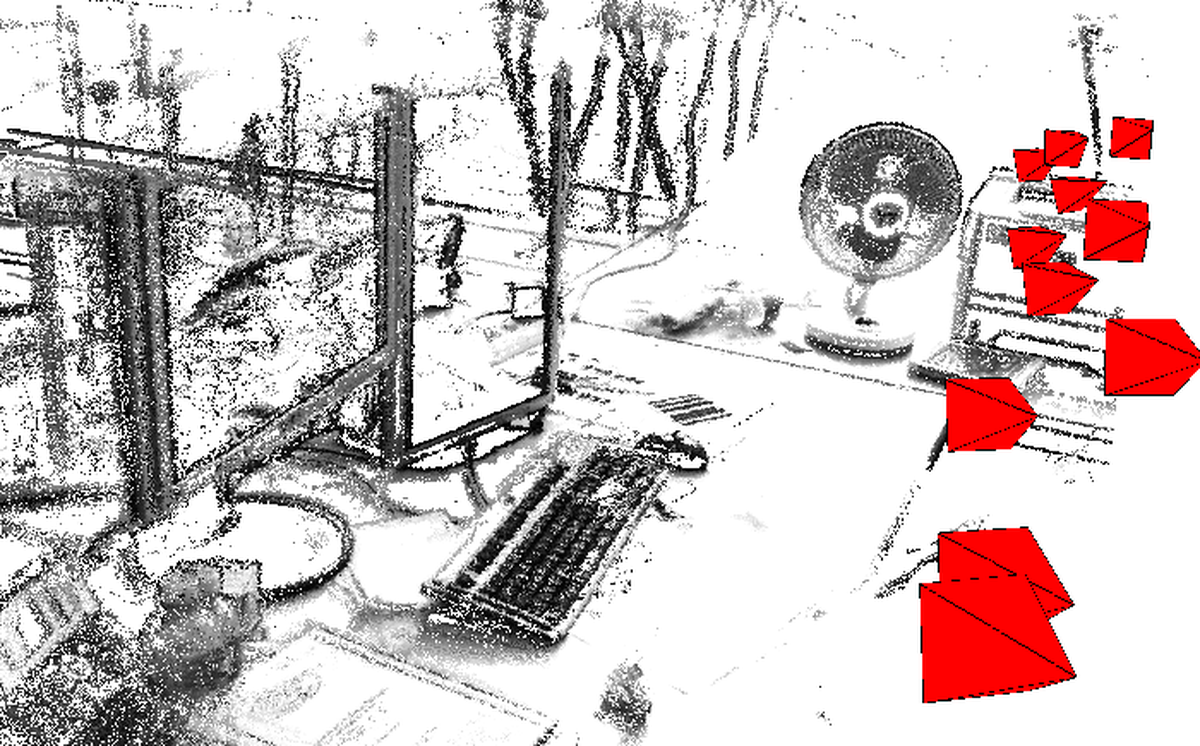
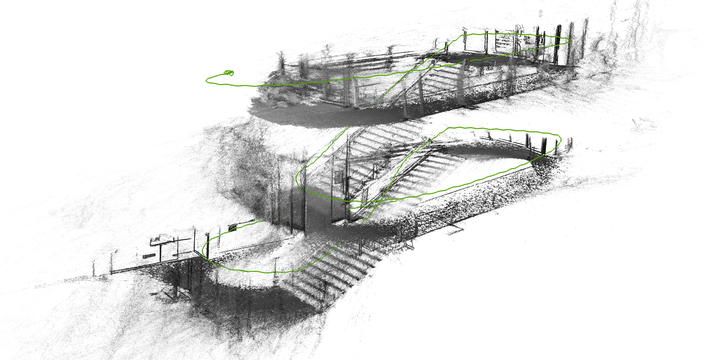
Light field camera based simultaneous localization and mapping (SLAM) focuses on the estimation of the camera trajectory as well as a 3D reconstruction of the environment based on an image sequence recorded by a light field camera. The 4D light field enables metric scale tracking and mapping based on a single camera.