Zusammenfassung
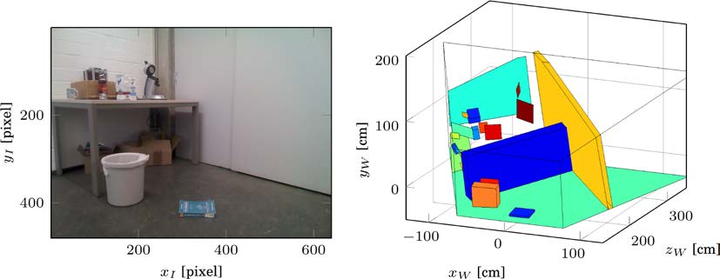
Dieser Artikel beschreibt ein System zur 3D-Rekonstruktion der Umgebung und zur Hinderniserkennung für blinde Personen. Basierend auf einer Microsoft Kinect wurden Algorithmen zur 3D-Rekonstruktion entwickelt. Diese Algorithmen realisieren eine kombinierte Gradienten- und RANSAC-basierte Ebenensegmentierung. Die resultierenden Ebenensegmente werden anhand ihrer Schnittkanten zu 3D-Objekten zusammengefasst. Hierbei wird eine generalisierende und zuverlässige Rekonstruktion der Umgebung angestrebt, welche z.B. über modulierte Audiosignale an die blinde Person weitergegeben werden kann. In dem hier vorgestellten System werden Objekte daher ausschließlich durch Quader modelliert. Beispielszenen demonstrieren die Vor- und Nachteile des Systems.
Publikation
DGPF Tagungsband